Se localiser, lorsque le GPS fait défaut : aperçu de la géolocalisation perceptive

Vous est-il déjà arrivé que le GPS de votre voiture soit perdu, ou ne fonctionne simplement pas ? Dans une telle situation, un conducteur s’appuiera sur son sens de l’orientation, et sa connaissance de la ville dans laquelle il roule pour arriver à bon port. Cette démarche, que nous qualifions de « localisation extéroceptive », consiste à utiliser la connaissance des lieux autour de soi pour se retrouver.
Depuis le début des années 1990, des chercheurs et ingénieurs ont développé et raffiné des techniques et algorithmes imitant ce processus, pour permettre à un véhicule ou à un robot de déterminer précisément sa position en combinant des capteurs, des algorithmes de vision par ordinateur et une cartographie embarquée. Dans cet article, nous verrons tout d’abord comment nous, humains, faisons appel à notre sens de l’orientation, puis expliquerons comment ce processus peut être automatisé et embarqué dans un système de géolocalisation en temps réel.
Faire appel à notre sens de l’orientation
Lorsque nous faisons appel à notre sens de l’orientation, nous nous engageons dans un processus intuitif de repérage visuel et spatial.

Cela implique d’abord l’examen attentif de la zone environnante pour identifier des éléments remarquables, tels que des bâtiments, des panneaux routiers ou des points de repère visuels. Ensuite, nous utilisons ces repères pour établir un lien avec une carte mentale ou physique, en comparant notre environnement proche ou lointain avec celle-ci. Enfin, nous interprétons cette comparaison pour estimer notre position précise.
Ce processus repose sur notre capacité innée à associer des données visuelles à une représentation mentale de l’espace, ce qui nous permet de nous orienter avec succès, même en l’absence de guidage GPS précis.
Supposons, par exemple, que nous pénétrions dans une station de métro, et que, par conséquent, le GPS de notre smartphone cesse de fonctionner, mais que nous ayons un plan du souterrain à notre disposition (voir image ci-dessous). Dans un premier temps, nous localisons sur la carte notre dernière position connue ou une zone approximative de celle-ci, comme le point d’entrée à la station de métro que nous avons utilisé. Ensuite, nous retrouvons sur la carte l’itinéraire que nous avons suivi depuis cette position connue, par exemple, en notant que nous avons tourné à gauche, puis à droite, le tout sur une vingtaine de mètres.
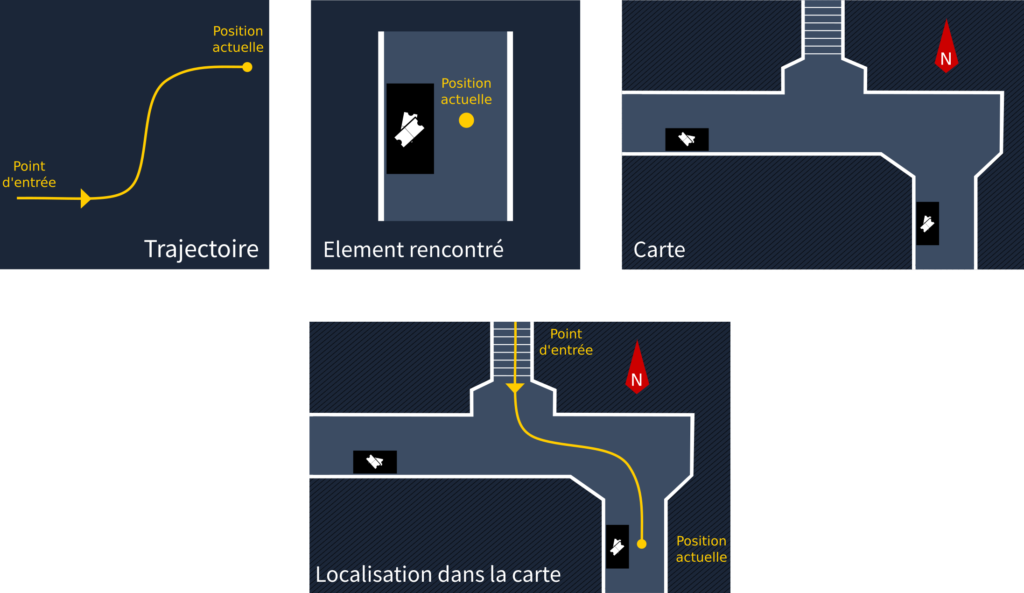
Cependant, il est fréquent que nous ne connaissions pas précisément nos déplacements ou notre orientation précise. Nous rectifions donc notre trajectoire en nous basant sur les éléments rencontrés en cours de route qui sont indiquées sur la carte. Par exemple, si nous avons croisé un distributeur de ticket qui est indiqué sur notre carte, nous pouvons affiner notre position grâce à cette information.
La Localisation extéroceptive, ou comment doter les véhicules d’un sens de l’orientation
La localisation extéroceptive, à la base de la technologie de dotflow, reproduit ce processus de localisation en temps réel en associant des capteurs, des algorithmes de vision par ordinateur, et une cartographie précise de la zone traversée par le véhicule.
L’utilisation de capteurs tels qu’une caméra ou un LiDAR permet d’observer l’environnement immédiat du véhicule. Dans le même temps, pour mesurer ses déplacements, d’autres capteurs tels qu’un odomètre ou une centrale inertielle peuvent être utilisés.
Ensuite, des algorithmes de vision par ordinateur interprètent les données brutes des capteurs pour identifier des éléments remarquables. Ces éléments, dans un contexte routier, peuvent être par exemple des panneaux routiers, des lignes de voies ou des glissières de sécurité.
Enfin, la localisation extéroceptive s’appuie sur une cartographie détaillée de l’environnement, contenant la position de ces éléments remarquables, visibles par les capteurs et détectables par les algorithmes. Le système embarqué collecte ces observations et les compare à la cartographie pour déterminer avec précision la position du véhicule. Cette cartographie peut contenir des informations très variées, comme des plans de bâtiments, la position des panneaux routiers le long des autoroutes ou celle des points d’accès Wi-Fi dans un quartier.
Le GPS, ou comment utiliser une cartographie de satellites
Le GPS, que nous avons précédemment exploré, peut être considéré comme une variante de la localisation extéroceptive. En effet, les systèmes GNSS (dont fait partie le GPS) s’appuient sur la mesure des distances entre le récepteur et les satellites. Pour déduire la position du récepteur, le système s’appuie sur une cartographie dynamique de la position des satellites en orbite, tandis que l’antenne réceptrice du GPS agit en tant que capteur qui observe les satellites.

Ainsi, il convient de souligner que la localisation extéroceptive ne s’oppose pas au GPS, mais plutôt, elle englobe cette technologie dans le cadre d’une discipline plus complète, dont les systèmes GNSS sont une application directe.
Conclusion
Lorsque le GPS nous fait défaut, notre sens de l’orientation devient notre allié pour nous guider. Ce processus de repérage visuel et spatial a été automatisé sous forme de systèmes embarqués dits de localisation extéroceptive. Ils permettent aux véhicules et aux robots de déterminer leur position en temps réel grâce à des capteurs, des algorithmes de vision par ordinateur et une cartographie détaillée de leur environnement.

La localisation extéroceptive trouve des applications passionnantes dans divers domaines, qui vont des véhicules autonomes auxquels elle fournit une position précise et fiable, à la géolocalisation en milieu souterrain. Par exemple, dans le cas des métros, elle permet de remplacer les capteurs déployés le long des voies par d’autres capteurs embarqués dans le matériel roulant. Cette technologie, développée par dotflow, permet ainsi une meilleure gestion des flottes de véhicules et une amélioration de la sécurité des transports routiers.
Si vous êtes intéressés par les dernières avancées en matière de localisation extéroceptive et ses applications passionnantes, visitez notre page linkedIn et découvrez comment dotflow contribue à façonner l’avenir de la localisation et de la navigation.